本文为原创,可在署名“余霖 帅新辉 王月”和转自“昆明市水利学会”的前提下转载,否则视为侵权!
多波束测量技术结合动态定位后处理技术在三维数字化水下地形探测中的应用
1 导言
多波束测量技术采取广角度发射和多信道定向接收,获得水下高密度条幅式水底地形数据,从而彻底刷新了传统测深技术的基本概念,突破了传统单波束测深技术的局限,大大提高了水下地形勘测的精度、分辨率和工作效率,实现了测深技术史上的一次革命性突破。多波束勘测技术形成了新的海底地形测量技术框架,使其在测深原理、系统构成、射线几何学、误差来源、校改正技术和勘测方法等方面形成了鲜明的特点。
PPK动态定位后处理技术是最早的GPS动态差分技术方式,他与RTK技术的主要区别在于:基准站和流动站之间不必像RTK那样建立实时数据传输,而是在定位后对接收机所采集的定位数据进行联合处理,计算出流动站在对应实际上的坐标,基准站和流动站之间的距离没有严格的限制。其优点是定位精度高、作业效率高和作业半径大。
二者的结合运用无疑将大大提高三维数字化水下地形探测的效率和精度。
2 技术简介
2.1 多波束测量技术
多波束测深系统也称声纳阵列测深系统。近年来多波束测深技术日益成熟,波束数已从1997年首台Sea Beam系统的16个增加到目前100多个,波束宽度从原来的2.67°度减到目前的1°至2°,总扫描宽度从40°增大至目前的150°至180°。GPS全球定位系统在多波束测深系统中的应用,使得多波束测深系统不仅在海洋测绘中得到广泛应用,而且在江河湖泊测绘中的作用日益广泛。目前多波束测深系统不仅实现了测深数据自动化和在外业准实时自动绘制出测区水下彩色等深图。
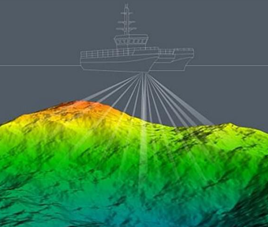
多波束测深系统工作原理和单波束测深一样,是利用超声波原理进行工作的,不同的是多波束测深系统信号接收部分由n个成一定角度分布的相互独立的换能器完成,每次能采集到n个水深点信息。
本项目投入使用的多波束测深系统型号为R2Sonic 2024,该系统通过采用波动物理原理的“相控阵”方法可以精确定位(或称为指向)256个波束中每个波束的精确指向(位置)。其指向性可控制到0.5°。然后根据每个波束位置上的回波信号用振幅和相位方法确定深度。多波束系统组成及工作原理图见图1。
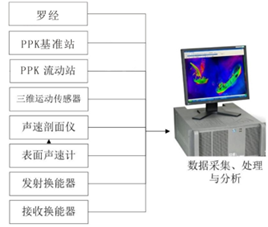 |  |
| a.多波束系统组成图 | b.多波束系统工作示意图 |
图1 多波束系统组成及工作示意图
2.2 动态定位后处理技术
PPK测量技术的工作原理是,在一定的有效距离范围内,在测量工作区适当位置处架设一台或者多台基准站接收机,再使用至少一台GNSS接收机作为流动站在作业区域进行测绘,由于同步观测的流动站和基准站的卫星钟差等各类误差具有较强的空间相关性,外业观测结束以后在计算机中利用GNSS处理软件进行差分处理,进行线性组合,并形成虚拟的载波相位观测值,计算出流动站和基准站接收机之间的空间相对位置;然后在软件里固定基准站的已知坐标,即可解算出流动站待测点的坐标。作业过程中基准站GNSS接收机保持连续观测,流动站GNSS接收机先进行初始化,再依次在每个待测点上进行一定时间的观测,为了将整周模糊度传递至待测点,流动站接收机迁站过程中需要对卫星的保持持续跟踪,基准站也可以是CORS系统,即流动站只要在CORS系统有效覆盖范围内即可进行PPK作业并解算。动态定位后处理作业模式见图2。

图2 动态定位后处理作业模式示意图
3 工程应用
3.1 探测成果
利用多波束测量技术,结合水位监测、声速剖面测量、动态定位后处理技术采集了高精度的某水电站库区水下地形地貌数据;利用点云处理方法和数字成图技术实现了该水电站库区水下地形地貌的三维可视化。
库区水下地形数字高程模型(DEM)见图3,数字线划图(DLG)见图4。

图3 某水电站大坝上游15km至大坝库区水底数字高程模型示意图

图4 某水电站大坝上游15km至大坝库区水底数字线划图示意图
上述成果图是对某水电站库区水下地形地貌真实呈现,既有二维的数字线画图又有三维可视化的数字高程模型,且27天内完成了148km²平均水深在100m左右的三维数字化水下全地形探测,采集到了高精度的三维点云数据,作业效率极高。
3.2 成果评价
结合定位数据和测深数据对测量成果进行价。
①定位数据:项目采用了卫星动态定位后处理技术解算定位数据,利用该技术对多波束系统采集的定位数据进行后处理,实测数据点位中误差及处理后数据点位中误差见图5至图6。

图5 解算前点位中误差曲线图

图6 解算后点位中误差曲线图
由上述图表得出以下结论:
处理后数据点位中误差明显减小。依据《水电水利工程施工测量规范》(DLT 5173-2012)的要求,定位中误差应不超过±0.5m,由上图可见,处理后数据平面中误差介于0.012m至0.025m之间,处理后数据高程中误差介于0.025m至0.043m之间,满足《水电水利工程施工测量规范》(DLT 5173-2012)要求。
②测深数据:为进一步评价多波束水深测量的可靠性,在测区内局部水域分别采用单波束测深技术与多波束测深技术沿相同测线对水底地形进行了重复测量,比对点数70个,测深曲线对比图见图7。

图7 多波束水深测量与单波束水深测量对比误差曲线
由对比曲线图可知:多波束(中央波束)实测水深与单波束实测水深之差介于-0.35m至0.26m之间,差值平均值为-0.03m,中误差为0.012m。满足《水电水利工程施工测量规范》(DLT 5173-2012)高程中误差水深值小于等于20m时,高程中误差为±0.2m,高程中误差水深值大于20m时,高程中误差为±0.01H(H为水深值,单位m)的要求。
4 结语
多波束测量技术是一种具有高效率、高精度和高分辨率的三维数字化探测技术。利用多波束测量技术结合动态定位后处理技术在开阔水域水下三维数字化地形探测项目中进行水下地形地貌数据采集,得到的高精度三维成果数据相较于传统的以断面测量为主的水下地形测量方式得到的成果数据有质的变化,对于水底淤积不仅限于断面叠加分析更能由两期地形数据进行整体分析,从区域方面判断水下淤积及冲刷,在工程应用中具有作业效率高和数据精度高的优势,具有广泛的应用前景。
[2]赵钢,王冬梅,黄俊友,吴杰.多波束与单波束测探技术在水下工程中的应用比较研究.江苏省水利科学研究院,2010,02:27-2
[3]汪剑桥.川江航道多波束测量技术研究[A].科技资讯,2014年第19期.
[4]姜颖.多波束测深系统在水深测量中的应用.中国房地产业下旬,2018年第02期.
[5]畅毅,房建雪,周敏,魏文宏,李文成.PPK技术作业模式与精度分析[A].中国石油东方公司装备事业部,2009,01:0033-05.
[6]卢兴祥.GPS后处理动态(PPK)测量技术在航道测量中的应用.长江水利委员会长江口水文资源勘测局,2009,08:21-23.